[/nextpage][nextpage title=”Description” ]Any AVR microcontroller based board which follows the standard Arduino schematic and is flashed with the Arduino
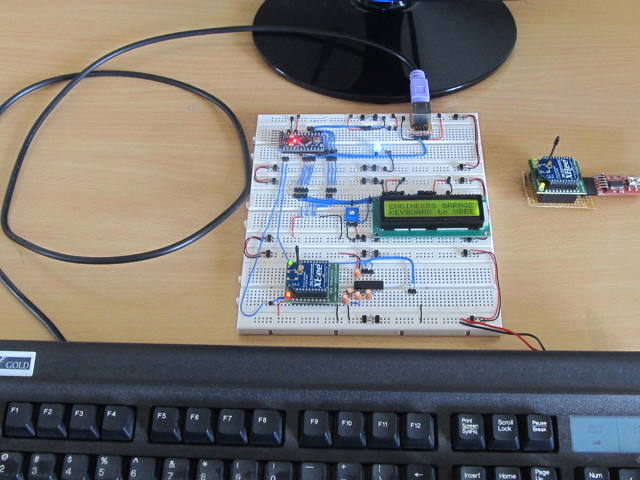
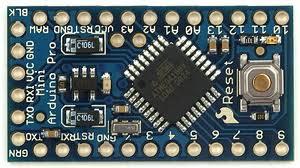
can be called an arduino board. The arduino boot-loaderenables different Arduino boards to be connected and programmed with the Arduino IDE. The Arduino board used in this project is the Arduino pro-mini board and the IDE version of the arduino is 1.0.3 for windows.The image of the Arduino pro-mini board and the Arduino IDE are shown below:
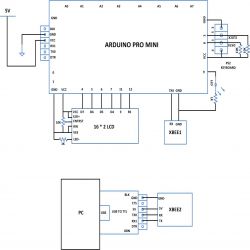
Since the Xbee modules communicate using serial communication protocol with the interfacing devices they can be connected to a microcontroller using a minimum of four pins, Power supply, and Ground,UART Data Out, and UART Data In pins.The pin number 2, UART Data Out is connected to the RX1 pin of the Arduino pro mini board and pin number 3 UART Data In is connected to the TX0 pin.
The keyboard always has 6 pin mini-DIN male connector for PS2 interface and the host device always has the corresponding female pin. The images and the pin-outs of the PS2 male and female connectors are shown in the following image, the only difference between the PS2 keyboard and mouse connectors are in their color.
[/nextpage][nextpage title=”Code1″ ]/*============================ EG LABS ===================================//
keyboard.begin(DATA_PIN); // initialize the PS2 keyboard
if(keyboard.available()) // check if there is any data coming from the keyboard
char dat = keyboard.read(); // read the data from the keyboard
[/nextpage][nextpage title=”Code2″ ]Header File
#include <avr/io.h>
#include <avr/interrupt.h>
#include <avr/pgmspace.h>
#include “Arduino.h”
#include “PS2Keyboard.h”
#include “binary.h”
typedef uint8_t boolean;
typedef uint8_t byte;
int ps2Keyboard_DataPin;
byte ps2Keyboard_CurrentBuffer;
volatile byte ps2Keyboard_CharBuffer;
volatile byte ps2Keyboard_BufferPos;
// variables used to remember information about key presses
volatile bool ps2Keyboard_shift; // indicates shift key is pressed
volatile bool ps2Keyboard_ctrl; // indicates the ctrl key is pressed
volatile bool ps2Keyboard_alt; // indicates the alt key is pressed
volatile bool ps2Keyboard_extend; // remembers a keyboard extended char received
volatile bool ps2Keyboard_release; // distinguishes key presses from releases
volatile bool ps2Keyboard_caps_lock; // remembers shift lock has been pressed
// vairables used in sending command bytes to the keyboard, eg caps_lock light
volatile boolean cmd_in_progress;
volatile int cmd_count;
byte cmd_value;
volatile byte cmd_ack_value;
byte cmd_parity;
volatile boolean cmd_ack_byte_ok;
// sending command bytes to the keybaord needs proper parity (otherwise the keyboard
// just asks you to repeat the byte)
byte odd_parity(byte val) {
int i, count = 1; // start with 0 for even parity
for (i=0; i<8; i++) {
if (val&1) count++;
val = val>>1;
}
return count & 1; // bottom bit of count is parity bit
}
void kbd_send_command(byte val) {
// stop interrupt routine from receiving characters so that we can use it
// to send a byte
cmd_in_progress = true;
cmd_count = 0;
// set up the byte to shift out and initialise the ack bit
cmd_value = val;
cmd_ack_value = 1; // the kbd will clear this bit on receiving the byte
cmd_parity = odd_parity(val);
// set the data pin as an output, ready for driving
digitalWrite(ps2Keyboard_DataPin, HIGH);
pinMode(ps2Keyboard_DataPin, OUTPUT);
// drive clock pin low – this is going to generate the first
// interrupt of the shifting out process
pinMode(PS2_INT_PIN, OUTPUT);
digitalWrite(PS2_INT_PIN, LOW);
// wait at least one clock cycle (in case the kbd is mid transmission)
delayMicroseconds(60);
// set up the 0 start bit
digitalWrite(ps2Keyboard_DataPin, LOW);
// let go of clock – the kbd takes over driving the clock from here
digitalWrite(PS2_INT_PIN, HIGH);
pinMode(PS2_INT_PIN, INPUT);
// wait for interrupt routine to shift out byte, parity and receive ack bit
while (cmd_ack_value!=0) ;
// switch back to the interrupt routine receiving characters from the kbd
cmd_in_progress = false;
}
void PS2Keyboard::reset() {
kbd_send_command(0xFF); // send the kbd reset code to the kbd: 3 lights
// should flash briefly on the kbd
// reset all the global variables
ps2Keyboard_CurrentBuffer = 0;
ps2Keyboard_CharBuffer = 0;
ps2Keyboard_BufferPos = 0;
ps2Keyboard_shift = false;
ps2Keyboard_ctrl = false;
ps2Keyboard_alt = false;
ps2Keyboard_extend = false;
ps2Keyboard_release = false;
ps2Keyboard_caps_lock = false;
cmd_in_progress = false;
cmd_count = 0;
cmd_value = 0;
cmd_ack_value = 1;
}
// val : bit_2=caps_lock, bit_1=num_lock, bit_0=scroll_lock
void kbd_set_lights(byte val) {
// When setting the lights with the 0xED command the keyboard responds
// with an “ack byte”, 0xFA. This is NOT the same as the “ack bit” that
// follows the succesful shifting of each command byte.
cmd_ack_byte_ok = false; // initialise the ack byte flag
kbd_send_command(0xED); // send the command byte
while (!cmd_ack_byte_ok) ; // ack byte from keyboard sets this flag
kbd_send_command(val); // now send the data
}
// The ISR for the external interrupt
// This may look like a lot of code for an Interrupt routine, but the switch
// statements are fast and the path through the routine is only ever a few
// simple lines of code.
void ps2interrupt (void) {
int value = digitalRead(ps2Keyboard_DataPin);
// This is the code to send a byte to the keyboard. Actually its 12 bits:
// a start bit, 8 data bits, 1 parity, 1 stop bit, 1 ack bit (from the kbd)
if (cmd_in_progress) {
cmd_count++; // cmd_count keeps track of the shifting
switch (cmd_count) {
case 1: // start bit
digitalWrite(ps2Keyboard_DataPin,LOW);
break;
case 2: case 3: case 4: case 5: case 6: case 7: case 8: case 9:
// data bits to shift
digitalWrite(ps2Keyboard_DataPin,cmd_value&1);
cmd_value = cmd_value>>1;
break;
case 10: // parity bit
digitalWrite(ps2Keyboard_DataPin,cmd_parity);
break;
case 11: // stop bit
// release the data pin, so stop bit actually relies on pull-up
// but this ensures the data pin is ready to be driven by the kbd for
// for the next bit.
digitalWrite(ps2Keyboard_DataPin, HIGH);
pinMode(ps2Keyboard_DataPin, INPUT);
break;
case 12: // ack bit – driven by the kbd, so we read its value
cmd_ack_value = digitalRead(ps2Keyboard_DataPin);
cmd_in_progress = false; // done shifting out
}
return; // don’t fall through to the receive section of the ISR
}
// receive section of the ISR
// shift the bits in
if(ps2Keyboard_BufferPos > 0 && ps2Keyboard_BufferPos < 11) {
ps2Keyboard_CurrentBuffer |= (value << (ps2Keyboard_BufferPos – 1));
}
ps2Keyboard_BufferPos++; // keep track of shift-in position
if(ps2Keyboard_BufferPos == 11) { // a complete character received
switch (ps2Keyboard_CurrentBuffer) {
case 0xF0: { // key release char
ps2Keyboard_release = true;
ps2Keyboard_extend = false;
break;
}
case 0xFA: { // command acknowlegde byte
cmd_ack_byte_ok = true;
break;
}
case 0xE0: { // extended char set
ps2Keyboard_extend = true;
break;
}
case 0x12: // left shift
case 0x59: { // right shift
ps2Keyboard_shift = ps2Keyboard_release? false : true;
ps2Keyboard_release = false;
break;
}
case 0x11: { // alt key (right alt is extended 0x11)
ps2Keyboard_alt = ps2Keyboard_release? false : true;
ps2Keyboard_release = false;
break;
}
case 0x14: { // ctrl key (right ctrl is extended 0x14)
ps2Keyboard_ctrl = ps2Keyboard_release? false : true;
ps2Keyboard_release = false;
break;
}
case 0x58: { // caps lock key
if (!ps2Keyboard_release) {
ps2Keyboard_caps_lock = ps2Keyboard_caps_lock? false : true;
// allow caps lock code through to enable light on and off
ps2Keyboard_CharBuffer = ps2Keyboard_CurrentBuffer;
}
else {
ps2Keyboard_release = false;
}
break;
}
default: { // a real key
if (ps2Keyboard_release) { // although ignore if its just released
ps2Keyboard_release = false;
}
else { // real keys go into CharBuffer
ps2Keyboard_CharBuffer = ps2Keyboard_CurrentBuffer;
}
}
}
ps2Keyboard_CurrentBuffer = 0;
ps2Keyboard_BufferPos = 0;
}
}
PS2Keyboard::PS2Keyboard() {
// nothing to do here
}
void PS2Keyboard::begin(int dataPin) {
// Prepare the global variables
ps2Keyboard_DataPin = dataPin;
ps2Keyboard_CurrentBuffer = 0;
ps2Keyboard_CharBuffer = 0;
ps2Keyboard_BufferPos = 0;
ps2Keyboard_shift = false;
ps2Keyboard_ctrl = false;
ps2Keyboard_alt = false;
ps2Keyboard_extend = false;
ps2Keyboard_release = false;
ps2Keyboard_caps_lock = false;
cmd_in_progress = false;
cmd_count = 0;
cmd_value = 0;
cmd_ack_value = 1;
// initialize the pins
pinMode(PS2_INT_PIN, INPUT);
digitalWrite(PS2_INT_PIN, HIGH);
pinMode(dataPin, INPUT);
digitalWrite(dataPin, HIGH);
attachInterrupt(1, ps2interrupt, FALLING);
#if 0
// Global Enable INT1 interrupt
EIMSK |= ( 1 << INT1);
// Falling edge triggers interrupt
EICRA |= (0 << ISC10) | (1 << ISC11);
#endif
}
bool PS2Keyboard::available() {
return ps2Keyboard_CharBuffer != 0;
}
// This routine allows a calling program to see if other other keys are held
// down when a character is received: ie <ctrl>, <alt>, <shift> or <shift_lock>
// Note that this routine must be called after available() has returned true,
// but BEFORE read(). The read() routine clears the buffer and allows another
// character to be received so these bits can change anytime after the read().
byte PS2Keyboard::read_extra() {
return (ps2Keyboard_caps_lock<<3) |
(ps2Keyboard_shift<<2) |
(ps2Keyboard_alt<<1) |
ps2Keyboard_ctrl;
}
byte PS2Keyboard::read() {
byte result;
// read the raw data from the keyboard
result = ps2Keyboard_CharBuffer;
// Use a switch for the code to character conversion.
// This is fast and actually only uses 4 bytes per simple line
switch (result) {
case 0x1C: result = ‘a’; break;
case 0x32: result = ‘b’; break;
case 0x21: result = ‘c’; break;
case 0x23: result = ‘d’; break;
case 0x24: result = ‘e’; break;
case 0x2B: result = ‘f’; break;
case 0x34: result = ‘g’; break;
case 0x33: result = ‘h’; break;
case 0x43: result = ‘i’; break;
case 0x3B: result = ‘j’; break;
case 0x42: result = ‘k’; break;
case 0x4B: result = ‘l’; break;
case 0x3A: result = ‘m’; break;
case 0x31: result = ‘n’; break;
case 0x44: result = ‘o’; break;
case 0x4D: result = ‘p’; break;
case 0x15: result = ‘q’; break;
case 0x2D: result = ‘r’; break;
case 0x1B: result = ‘s’; break;
case 0x2C: result = ‘t’; break;
case 0x3C: result = ‘u’; break;
case 0x2A: result = ‘v’; break;
case 0x1D: result = ‘w’; break;
case 0x22: result = ‘x’; break;
case 0x35: result = ‘y’; break;
case 0x1A: result = ‘z’; break;
// note that caps lock only used on a-z
case 0x41: result = ps2Keyboard_shift? ‘<‘ : ‘,’; break;
case 0x49: result = ps2Keyboard_shift? ‘>’ : ‘.’; break;
case 0x4A: result = ps2Keyboard_shift? ‘?’ : ‘/’; break;
case 0x54: result = ps2Keyboard_shift? ‘{‘ : ‘[‘; break;
case 0x5B: result = ps2Keyboard_shift? ‘}’ : ‘]’; break;
case 0x4E: result = ps2Keyboard_shift? ‘_’ : ‘-‘; break;
case 0x55: result = ps2Keyboard_shift? ‘+’ : ‘=’; break;
case 0x29: result = ‘ ‘; break;
case 0x45: result = ps2Keyboard_shift? ‘)’ : ‘0’; break;
case 0x16: result = ps2Keyboard_shift? ‘!’ : ‘1’; break;
case 0x1E: result = ps2Keyboard_shift? ‘@’ : ‘2’; break;
case 0x26: result = ps2Keyboard_shift? ‘£’ : ‘3’; break;
case 0x25: result = ps2Keyboard_shift? ‘$’ : ‘4’; break;
case 0x2E: result = ps2Keyboard_shift? ‘%’ : ‘5’; break;
case 0x36: result = ps2Keyboard_shift? ‘^’ : ‘6’; break;
case 0x3D: result = ps2Keyboard_shift? ‘&’ : ‘7’; break;
case 0x3E: result = ps2Keyboard_shift? ‘*’ : ‘8’; break;
case 0x46: result = ps2Keyboard_shift? ‘(‘ : ‘9’; break;
case 0x0D: result = ‘\t’; break;
case 0x5A: result = ‘\n’; break;
case 0x66: result = PS2_KC_BKSP; break;
case 0x69: result = ps2Keyboard_extend? PS2_KC_END : ‘1’; break;
case 0x6B: result = ps2Keyboard_extend? PS2_KC_LEFT : ‘4’; break;
case 0x6C: result = ps2Keyboard_extend? PS2_KC_HOME : ‘7’; break;
case 0x70: result = ps2Keyboard_extend? PS2_KC_INS : ‘0’; break;
case 0x71: result = ps2Keyboard_extend? PS2_KC_DEL : ‘.’; break;
case 0x72: result = ps2Keyboard_extend? PS2_KC_DOWN : ‘2’; break;
case 0x73: result = ‘5’; break;
case 0x74: result = ps2Keyboard_extend? PS2_KC_RIGHT : ‘6’; break;
case 0x75: result = ps2Keyboard_extend? PS2_KC_UP : ‘8’; break;
case 0x76: result = PS2_KC_ESC; break;
case 0x79: result = ‘+’; break;
case 0x7A: result = ps2Keyboard_extend? PS2_KC_PGDN : ‘3’; break;
case 0x7B: result = ‘-‘; break;
case 0x7C: result = ‘*’; break;
case 0x7D: result = ps2Keyboard_extend? PS2_KC_PGUP : ‘9’; break;
case 0x58:
// setting the keyboard lights is done here. Ideally it would be done
// in the interrupt routine itself and the key codes associated wth
// caps lock key presses would never be passed on as characters.
// However it would make the interrupt routine very messy with lots
// of extra state associated with the control of a caps_lock
// key code causing a cmd byte to transmit, causing an ack_byte to
// be received, then a data byte to transmit. Much easier done here.
// The downside, however, is that the light going on or off at the
// right time relies on the calling program to be checking for
// characters on a regular basis. If the calling program stops
// polling for characters at any point pressing the caps lock key
// will not change the state of the caps lock light while polling
// is not happening.
result = ps2Keyboard_caps_lock? PS2_KC_CLON : PS2_KC_CLOFF;
if (ps2Keyboard_caps_lock) kbd_set_lights(4);
else kbd_set_lights(0);
break;
// Reset the shift counter for unexpected values, to get back into sink
// This allows for hot plugging a keyboard in and out
default: delay(500); // but wait a bit in case part way through a shift
ps2Keyboard_BufferPos = 0;
ps2Keyboard_shift = false;
ps2Keyboard_ctrl = false;
ps2Keyboard_alt = false;
ps2Keyboard_extend = false;
ps2Keyboard_release = false;
ps2Keyboard_caps_lock = false;
} // end switch(result)
// shift a-z chars here (less code than in the switch statement)
if (((result>=’a’) && (result<=’z’)) &&
((ps2Keyboard_shift && !ps2Keyboard_caps_lock) ||
(!ps2Keyboard_shift && ps2Keyboard_caps_lock))) {
result = result + (‘A’-‘a’);
}
// done with the character
ps2Keyboard_CharBuffer = 0;
return(result);
}[/nextpage]