ABSTRACT:
In recent years, the definition of a robot is generally used to mean an unmanned system or automation, as often seen in industrial applications, deep sea planetary probes. Historically speaking, a robot used to be shaped like humans, and referred to as machines and electric systems that were capable of performing similar actions as humans. It is these robots that play active roles in comic magazines, animation and science fiction. Because they are artificially created, they are called “artificial man”. And since they look like humans in appearance, they are often called “androids” or “humanoids.
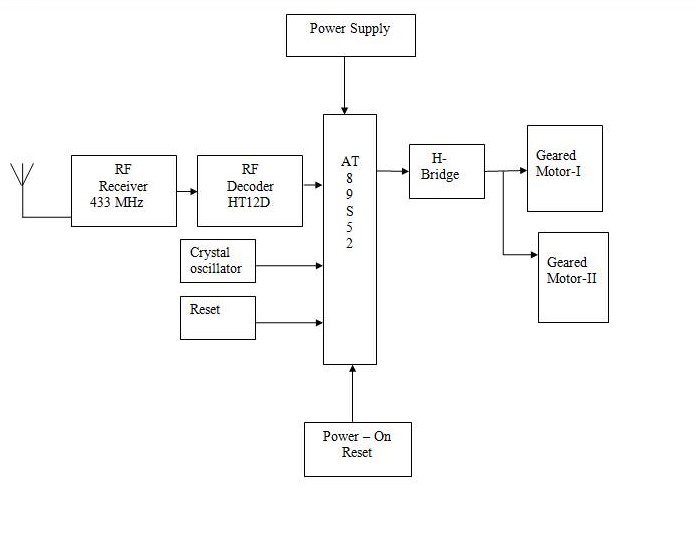
The robot will be moving according to the voice commands given by the user. This robot is controlled by an RF remote. This can be moved forward and reverse direction using geared motors of 60RPM. Also this robot can take sharp turnings towards left and right directions.
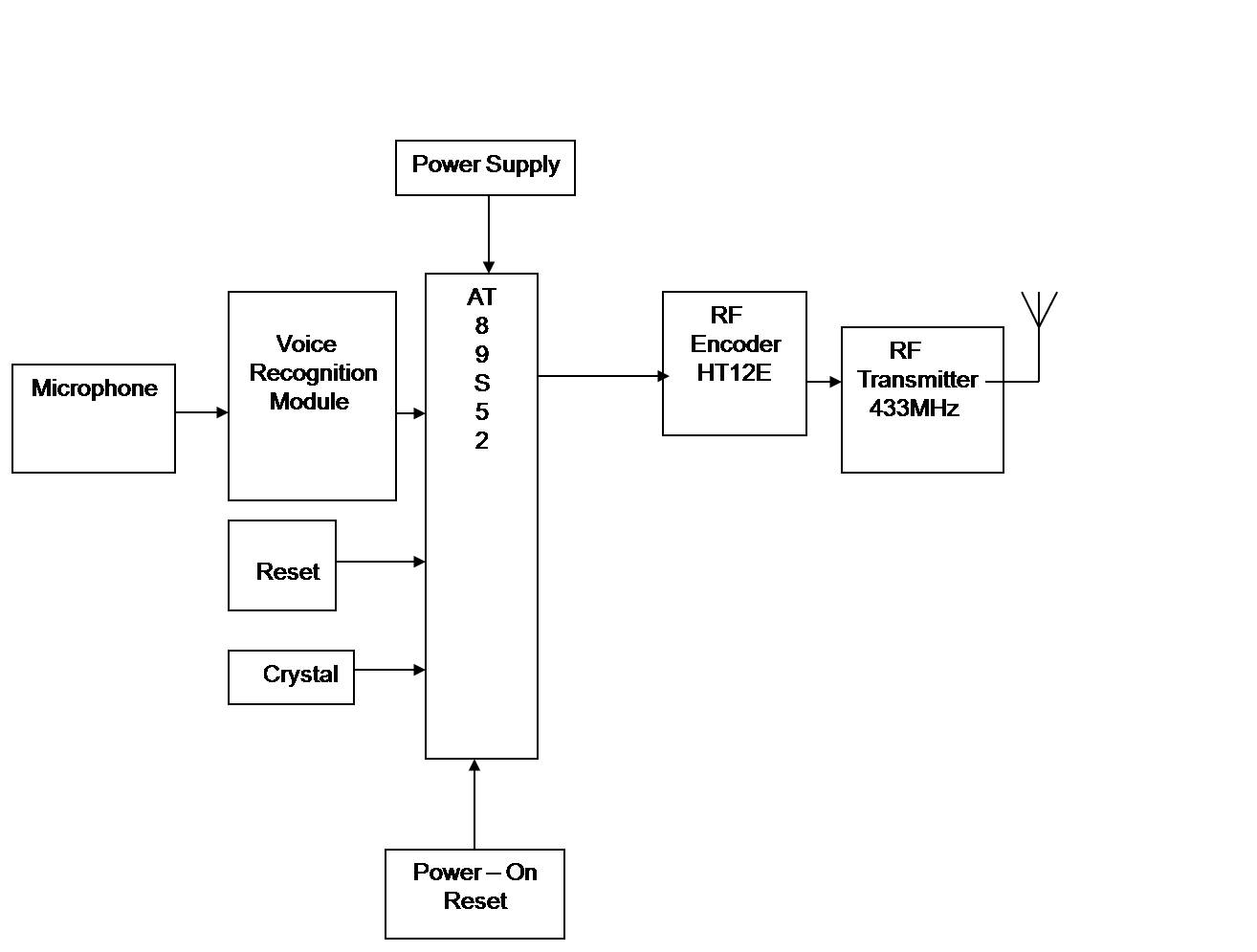
The RF modules used here are STT-433 MHz Transmitter, STR-433 MHz Receiver, HT640 RF Encoder and HT648 RF Decoder. By using a microphone, commands given by the user will be recognized by the voice recognition module. According to the different commands given by the user the robot will move front, back and left, right directions. This project uses AT89S52 MCU as its controller .This micro controller provides all the functionality of wireless control.
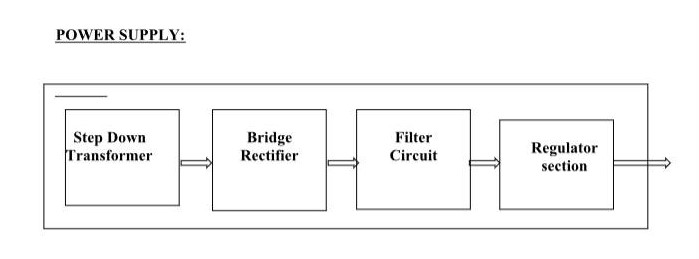
This project uses regulated 5V, 1A power supply. 7805 three terminal voltage regulator is used for voltage regulation. Bridge type full wave rectifier is used to rectify the ac output of secondary of 230/12V step down transformer.
BLOCK DIAGRAM:
(1)Transmitter:
(2)Receiver:
Power supply:









Post Comment
You must be logged in to post a comment.