INTRODUCTION:
A simple vision based autonomous flight control system is developed in this paper to study the feedback control capability of a system using only one web camera as the sensor. The position and attitude estimation is achieved based on the homography. Markers are attached to a RC helicopter to simplify the image processing. The position of markers relative to the helicopter is used as a prior knowledge in the position and attitude estimation. The system uses a PD controller to autonomously control the flight of the helicopter. Hovering experiments have been carried out to test the visual feedback control system. The helicopter hovered at a point 0.6m above the origin of the world coordinate for about 20 seconds during the test with single web camera. The system is capable to autonomous hovering flight, however has problems like drift. Further study and improvement is needed in the future works.
 BLOCK DIAGRAM:
BLOCK DIAGRAM:
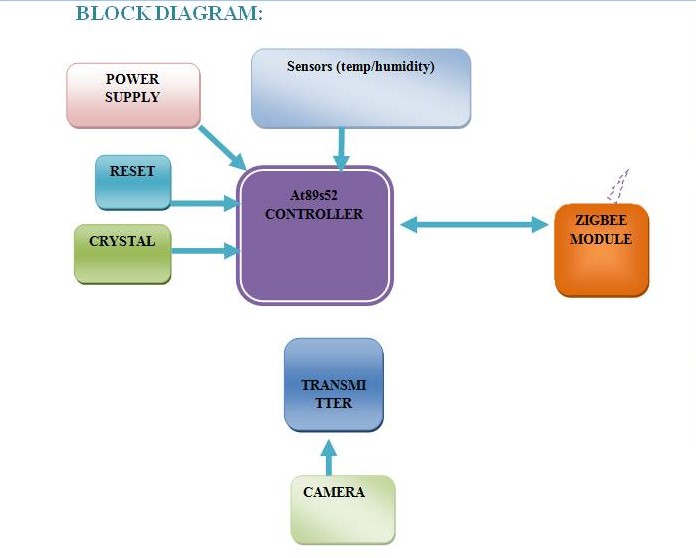
Hardware requirements:
- Microcontroller
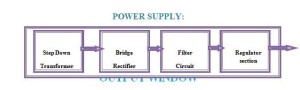
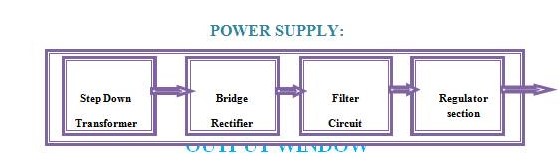
- Power supply
- Zigbee module
- Rs232
- Max 232
- sensors
Software requirements:
- Keil C cross compiler IDE
- Flash magic programmer tool
- Orcad hardware design tool
- Languages:
- Embedded C









Post Comment
You must be logged in to post a comment.