This Automatic Touch Screen Based Vehicle driving system deals with one of the application of vehicles. In this Automatic Vehicle driving system one moving object is developed such that it is moved as per commands given by touch pad and that command is received by micro controller which is placed on the vehicle and give information to the Touch pad which is connected to the microcontroller.
This project is equipped with DC motor, Touch pad, Micro controller along with the Power supply unit. vehicle finds it applications in the real time
Interfaces Used:
Power Supply:
The power supply unit is used to provide a constant 5V supply to different IC’s this is a standard circuits using external 12VDC adapter and fixed 3-pin voltage regulator. Diode is added in series to avoid Reverse voltage.
AVR Microcontroller:
The ATmega32 is a low-power CMOS 8-bit microcontroller based on the AVR enhanced RISC architecture. By executing powerful instructions in a single clock cycle, the ATmega32 achieves throughputs approaching 1 MIPS per MHz (max. 16MHz) allowing the system designer to optimize power consumption versus processing speed, Which provides features like 32K bytes of In-System Programmable Flash Program memory with Read-While-Write capabilities, 1024 bytes EEPROM, 2K byte SRAM, 32 general purpose I/O lines, 32 general purpose working registers, a JTAG interface for Boundary-scan, On-chip Debugging support and programming, three flexible Timer/Counters with compare modes, Internal and External Interrupts, a serial programmable USART, a byte oriented Two-wire Serial Interface, an 8-channel, 10-bit ADC with optional differential input stage with programmable gain, a programmable Watchdog Timer with Internal Oscillator, an SPI serial port, and six software selectable power saving modes.
Microcontroller:
The 89C51 is a low cost Micro controller from either ATMEL or PHILIPS. It has a 40-pin configuration and other components are interfaced to its ports. The entire functionality of the Digital Data Acquisition System device is under the control of Micro controller. The Micro controller takes input from the external sources and routes them to the appropriate devices as programmed in it.
Motors:
By far the vast majority of robots use electric motors, of which there are several kinds. DC motors, which are familiar to many people, spin rapidly when electric current is passed through them. They will spin backwards if the current is made to flow in the opposite direction.
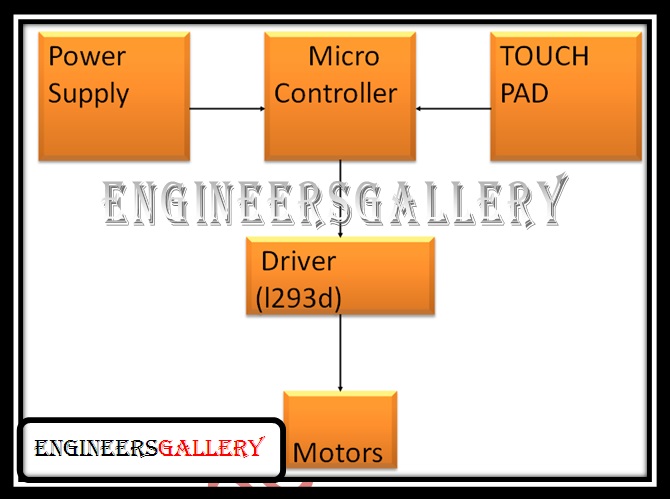
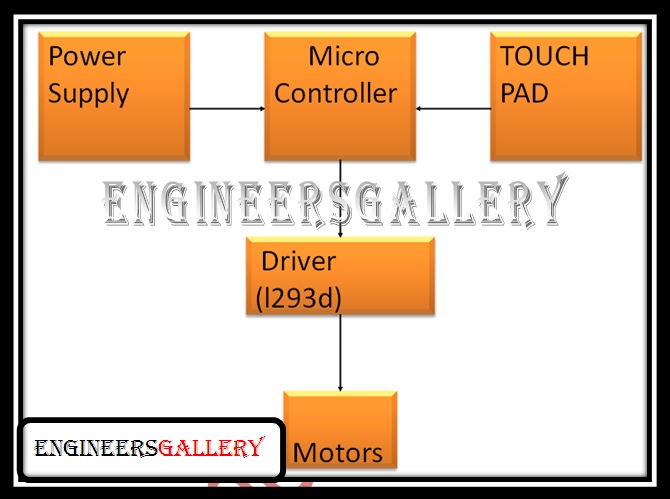
Block Diagram :
[visitor]
Click here to view Block Diagram (Free Registration )
[/visitor]
[sam id=”5″ codes=”true”]
[member]
[/member]









Post Comment
You must be logged in to post a comment.