INTRODUCTION:

First, let’s talk about the logic of the ultrasonic distance measuring sensors.
ULTRASONIC SENSOR:
ULTRASONIC SENSOR
Ultrasonic sensors send out sound waves in the range we are certain we multiply the value obtained in dayanır.bura them when we go back on the principle of detecting objects hit by the sound velocity has achieved the distance. X = V * t
The sound velocity 343m / s are used.
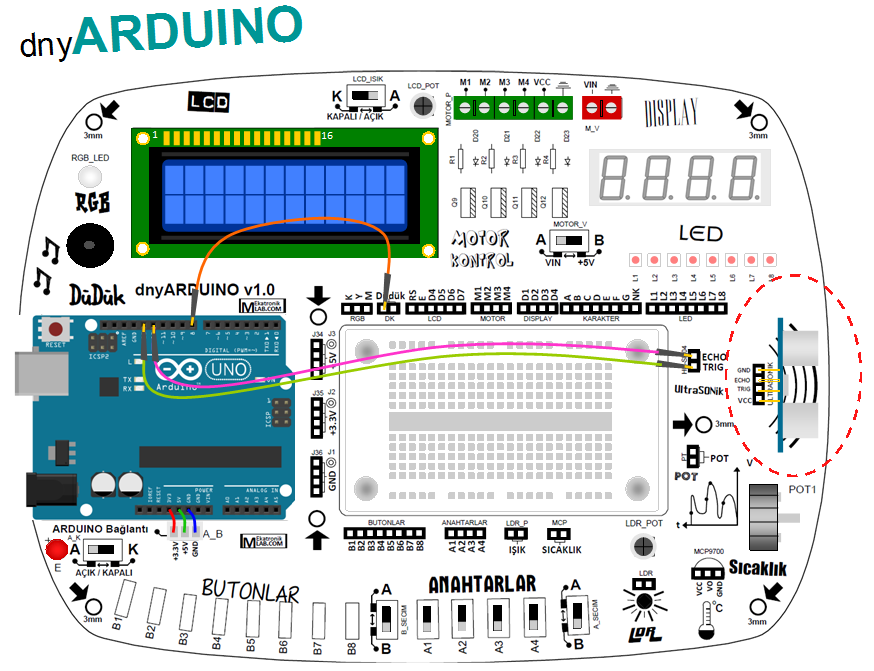
EASY CIRCUIT CONNECTIONS:
ARDUINO CODE:
#define trigPin 13#define echoPin 12void setup() {// put your setup code here, to run once:pinMode(trigPin, OUTPUT);pinMode(echoPin, INPUT);pinMode(8, OUTPUT);}void loop() {long duration, distance;digitalWrite(trigPin, LOW);delayMicroseconds(2);digitalWrite(trigPin, HIGH);delayMicroseconds(10);digitalWrite(trigPin, LOW);duration = pulseIn(echoPin, HIGH);distance = (duration/2) / 29.1; //29.1 =10000/343 yani 343m/s*t(zaman) yerine m yi cm ye saniyeyide ms çevirdiğinde ve çarpmak yerine ters çevirip bölersen 29.1 elde ediliyor.if(distance<=5){// put your main code here, to run repeatedly:digitalWrite(8,HIGH);delay(50);digitalWrite(8,LOW);delay(50);}if(distance>=5 && distance<=10){// put your main code here, to run repeatedly:digitalWrite(8,HIGH);delay(200);digitalWrite(8,LOW);delay(200);}if(distance>10 && distance<=15){// put your main code here, to run repeatedly:digitalWrite(8,HIGH);delay(500);digitalWrite(8,LOW);delay(500);}if(distance>15 && distance<= 20){// put your main code here, to run repeatedly:digitalWrite(8,HIGH);delay(50);digitalWrite(8,LOW);delay(50);}}