Introduction
In many application of controlling robotic gadget it becomes quite hard and complicated when there comes the part of controlling it with remote or many different switches.
Mostly in military application, industrial robotics, construction vehicles in civil side, medical application for surgery. In this field it is quite complicated to control the robot or particular machine with remote or switches, sometime the operator may get confused in the switches and button itself, so a new concept is introduced to control the machine with the movement of hand which will simultaneously control the movement of robot.
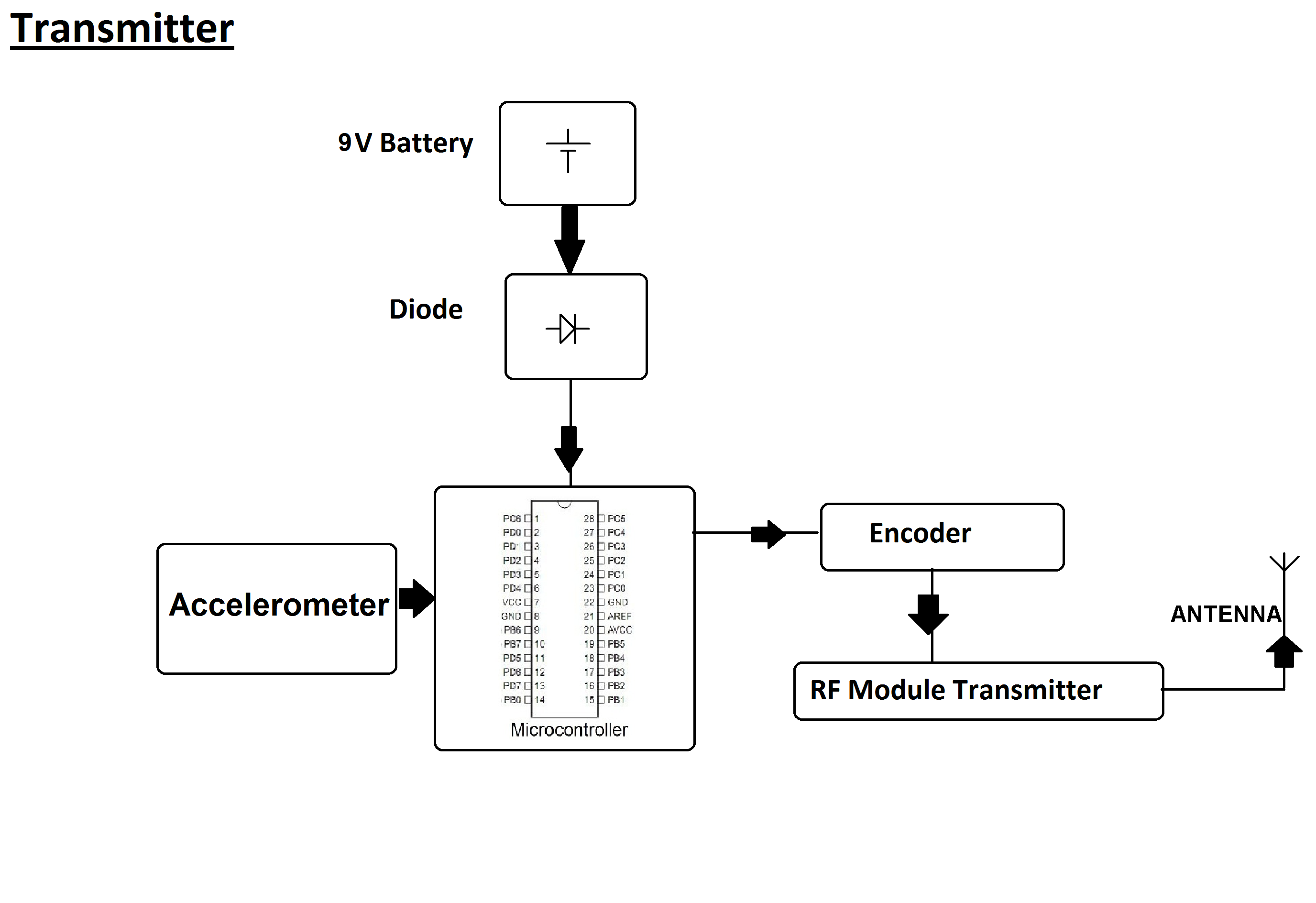
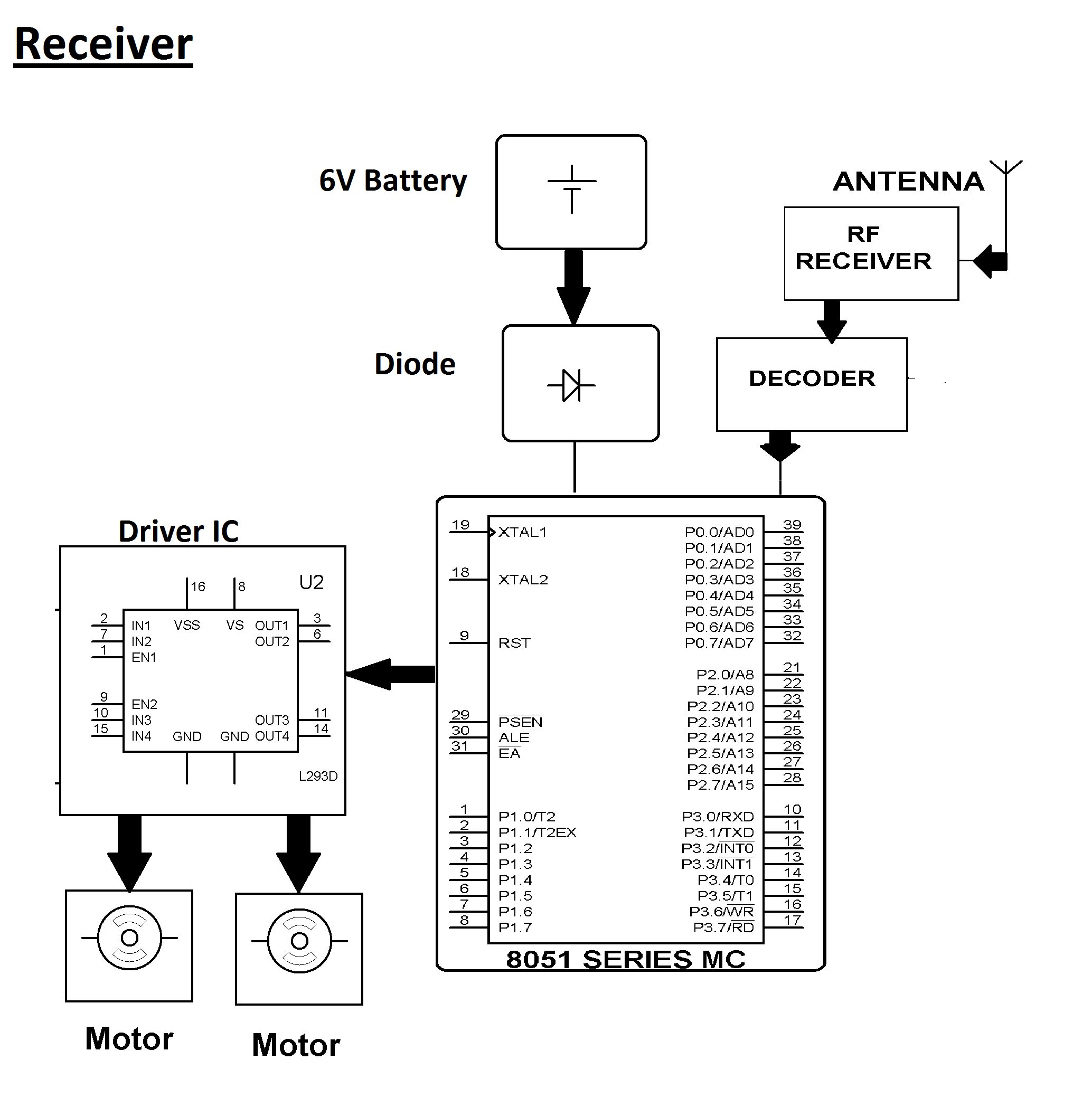
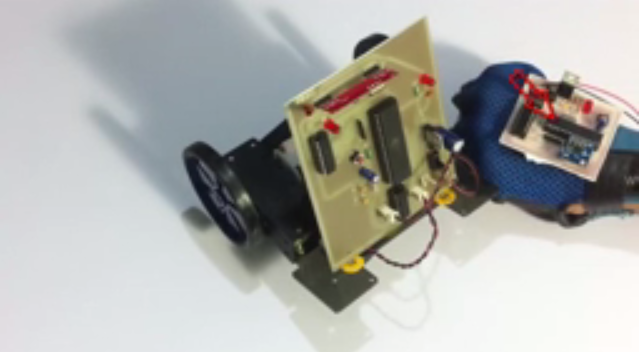
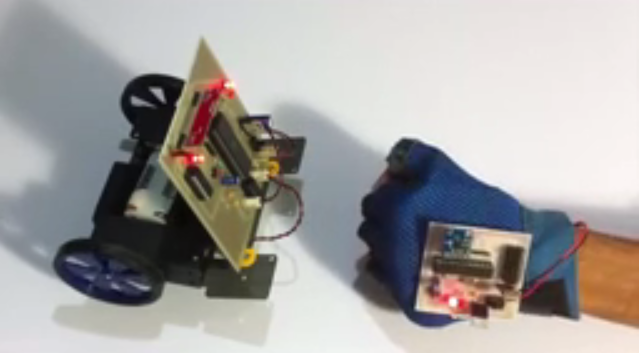
This system is very beneficial for disabled people as it allows movement of a robotic vehicle on the basis of hand movements. The person just has to move his hand in order to move the vehicle in forward, backward, left or right direction. So the user does not have to press any buttons. The system includes a receiver circuit designed which will be mounted on a top of a glove which the user has to wear. The circuit on the vehicle includes RF receiver, 8051 microcontroller and Driver IC to operate the motors. The receiver circuit that is on the top of a glove includes atmega family microcontroller interfaced to the accelerometer. The commands that are detected by the IC on this circuit are sent to the RF transmitter which then forwards the commands to the RF receiver. The RF receiver then sends the commands to 8051 microcontroller which processes the commands so that the vehicle moves in the specified direction.
Hardware Specifications
- 8051 series Microcontroller
- Vehicle Body
- Hand Glove
- Accelerometer
- Diode
- RF module
- Encoder
- Decoder
- Atmega Microcontroller
- Motor driver IC
- DC motors
Software Specifications
- Keil µVision IDE
- Avr Studio
- MC Programming Language: Embedded C
Result









Post Comment
You must be logged in to post a comment.