Well, it’s elementary simple in theory, how to do sound localization based on phase difference of signals, that received by two spatially distant microphones. The Devil, as always, in details. I’ve not seen any such project created for arduino, and get curious if it’s possible at all. Long story short, here I’d like to present my project, which answer this question – YES! Let me stress, project based on phase delay, not TDOA. Measurements results show, that current version of software (both copy of the source code, linked below, they differ only in filtering technics) has minimum detectable phase offset 1 degree!!!
[sam_block id=”2″]
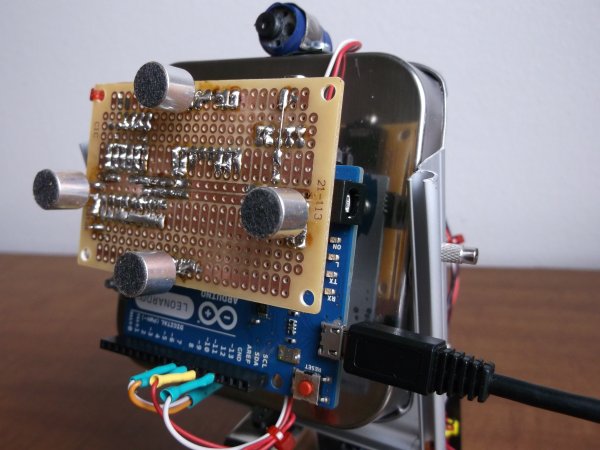
This gives astonishing special resolution. For example, 10 kHz sound wave has length in the air about 34 millimeters, and if I divide it by 360 degree – full period, I’d get about 0.1 millimeters per 1 degree of phase shift.. Of course, as object getting away from the microphones, accuracy would proportionally deteriorate. What important is a ratio between distance to the object and distance between two mic’s (base). Having the base equals to 65 millimeters, device you can see in the video, capable detect location along horizontal line with accuracy 1 meter at distance 650 meters. Theoretically. Compare two drawings, you will notice only 4 resistors and 4 electret microphones (mic’s) were added! All circuitry is just a few capacitors, 9 resistors, one IC and mic’s. Frankly speaking, writing a remix of oscilloscope, I was testing an arduino analog inputs, keeping in mind to use it in junction with electret microphones in other projects, like sound pressure measurements (dBA), voice recognition or something funny in “Color Music / Tears of Rainbow” series. As they call it – “a pilot” project?. There are some issue (simplest ever) oscilloscope has, when doing fast rate sampling with 4 channels (settings 7, 8 and 9 Time/Div ) I already described, so I slightly reduce sampling down to 40 kHz here. Note: *All of the above true for Arduino Leonardo. Hardware and Software would be different for arduino boards based on different chips, and must include pre-amplifiers with AtMega328 uCPU. One more important things to mention in this short introductory, as I used FFT algorithm for phase calculation ( I like FFT very much, you probably, already notice it ), Arduino is capable not only track a flying object in 3D space, it also could identify / distinguish this object based on spectral characteristic of the radiated sound, tell if it’s aircraft or helicopter, what type / model, and for living species like insects it could tell if its MALE of FEMALE !!!!! SOFTWARE. As I say above, I choose 40 kHz for sampling rate, which is a good compromise between accuracy of the readings and maximum audio frequency, that Localizator could hear. Getting signals from two mic’s simultaneously, upper limits for audio data is 10 kHz. No real-time, “conveyor belt” include 4 major separate stages:
- sampling X dimension, two mic’s (interleaving);
- FFT
- phase calculation
- delay time extracting
- sampling Y dimension, two mic’s;
- FFT
- phase calculation
- delay time extracting