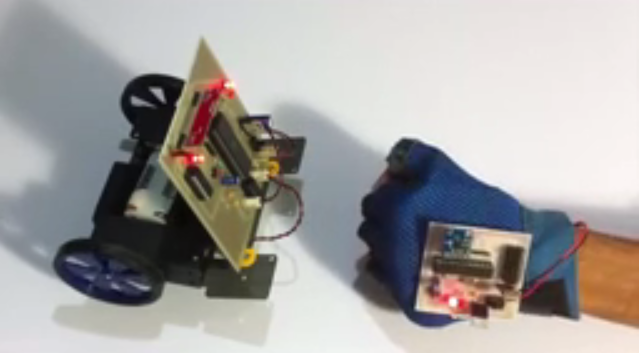
Hand Motion Controlled Robotic Vehicle
Amisha
analysis of robotic vehicle steering and controller delay, armed robotic vehicle, armed robotic vehicle arv, armed robotic vehicle assault light, autonomous robotic security vehicle, autonomous robotic vehicle, autonomous robotic vehicle for greenhouse spraying, autonomous robotic vehicle project, bluefin-21 robotic underwater vehicle, boss robotic vehicle, cutlass robotic vehicle, darpa robotic vehicle, fire fighting robot vehicle circuit diagram, fire fighting robotic vehicle pdf, fire fighting robotic vehicle project, first robotic vehicle, first robotic vehicle on mars, first robotic vehicle sent to mars, google's robotic vehicle, grizzly robotic utility vehicle, hobo robotic vehicle, how to build a robotic vehicle, how to make a robotic vehicle, ir controlled robotic vehicle pdf, line following robotic vehicle using microcontroller, line following robotic vehicle without microcontroller, metal detector robotic vehicle abstract, metal detector robotic vehicle circuit diagram, metal detector robotic vehicle pdf, metal detector robotic vehicle project, micro robotic vehicle, military robotic vehicle, modular robotic vehicle, mule robotic vehicle, multiple application robotic vehicle with bluetooth control, nasa robotic vehicle, nasa robotic vehicle crossword, nereus robotic vehicle, obstacle avoidance robotic vehicle pdf, robotic asteroid capture vehicle, robotic beeper vehicle, robotic capture vehicle, robotic eod vehicle, robotic evacuation vehicle, robotic extraction vehicle, robotic ground vehicle, robotic inspection vehicle, robotic mapping vehicle (rmv), robotic ocean vehicle, robotic operated vehicle, robotic reconnaissance vehicle, robotic rescue vehicle, robotic tracked vehicle, robotic transfer vehicle, robotic utility vehicle, robotic vehicle, robotic vehicle - a path finder, robotic vehicle control, robotic vehicle control architecture, robotic vehicle controlled by cell phone, robotic vehicle design, robotic vehicle kits, robotic vehicle movement by cell phone, robotic vehicle on mars, robotic vehicle operated by a tv remote, robotic vehicle opportunity, robotic vehicle pdf, robotic vehicle platform, robotic vehicle project, robotic vehicle stanley, robotic vehicles military, robotic waverider scramjet vehicle, romo - the robot electric vehicle, rover robotic vehicle, small robotic vehicles, underwater robotic vehicle, unmanned robotic vehicle, wildcat robotic vehicle, wildcat robotic vehicle youtube, wireless robotic vehicle
Introduction In many application of controlling robotic gadget it becomes quite hard and complicated when…
Read More